
Driver’s Mental Models of Advanced Vehicle Technologies: A Proposed Framework for Identifying and Predicting Operator Errors
This project proposes a framework for identifying and predicting operator errors when using advanced vehicle technology, such as active driving assistance systems. This research also examined the reporting of system limitations by automobile manufacturers.
February 2021
Introduction
Advanced vehicle technologies are increasingly more accessible and available in vehicles. In spite of the promise of added safety, convenience, and efficiency to drivers and road users, these systems are inherently complex. In order to maximize the promised benefits, drivers will need to have a good understanding of these systems—referred to as mental models—in order to use them safely and appropriately. Previous research has identified drivers’ gaps in knowledge of advanced vehicle technologies; however, characterizing a driver’s mental model remains a significant challenge.
The goals of this project, based on a cooperative research program between the AAA Foundation for Traffic Safety and the SAFER-SIM University Transportation Center, were as follows:
- To describe advanced vehicle technologies from a human operation perspective considering system functionalities, capabilities, limitations, controls, and displays. This involved a review of the scientific and technical literature, as well as the creation of visual descriptions of systems using state diagrams.
- To propose a framework for identifying and predicting operator errors when using such systems. Multiple task analysis techniques were leveraged and adapted to identify and classify potential operator errors that may occur while using a system.
Key Findings
This research also examined the reporting of system limitations by automobile manufacturers. Owner’s manuals and other materials were contrasted to examine the level of detail in reporting of system limitations across selected vehicle makes and models.
Framework for Predicting and Identifying Operator Errors
State diagrams were employed to facilitate comprehension and visualization of advanced vehicle technologies. These diagrams are useful for characterizing a system that can be in any one of a finite number of states at any given time and where transitions from one state to another (e.g., from “off” to “standby”) are possible (i.e., a finite state machine). Although state diagrams can be applied to a wide variety of systems, Adaptive Cruise Control (ACC) was used in the current report as an illustrative example (see figure). State diagrams for the ACC systems of five vehicles were also completed (Ford F‑150, Toyota RAV4, Volvo XC60, Honda CR-V, and Subaru Outback). The process for building state diagrams is detailed in the full report.
Using the state diagrams as a backdrop, a framework was conceptualized to identify errors in the use of advanced vehicle systems to help understand drivers’ mental models. Multiple task analysis techniques were leveraged and adapted to identify operator errors that may occur while using a system (i.e., through different system state changes), and to classify those identified based on error taxonomies. The state diagrams and task analyses were thus used to describe operator–system interactions, to identify state transitions and associated controls, and ultimately to identify and predict potential errors that could result during these operations.
Each state transition can be comprehensively analyzed to list the control-based errors that a user may commit while attempting to undertake the actions required for the desired transition. That is, for each state transition, there is a possibility that the driver performs the incorrect subtask (user input) that does not contribute towards the desired transition or fails to perform the correct input. The process also allows for the mapping of these errors to underlying behavioral, cognitive, or other factors. Undertaking this error prediction and identification exercise can yield a comprehensive error listing that can be further categorized according to existing taxonomies.
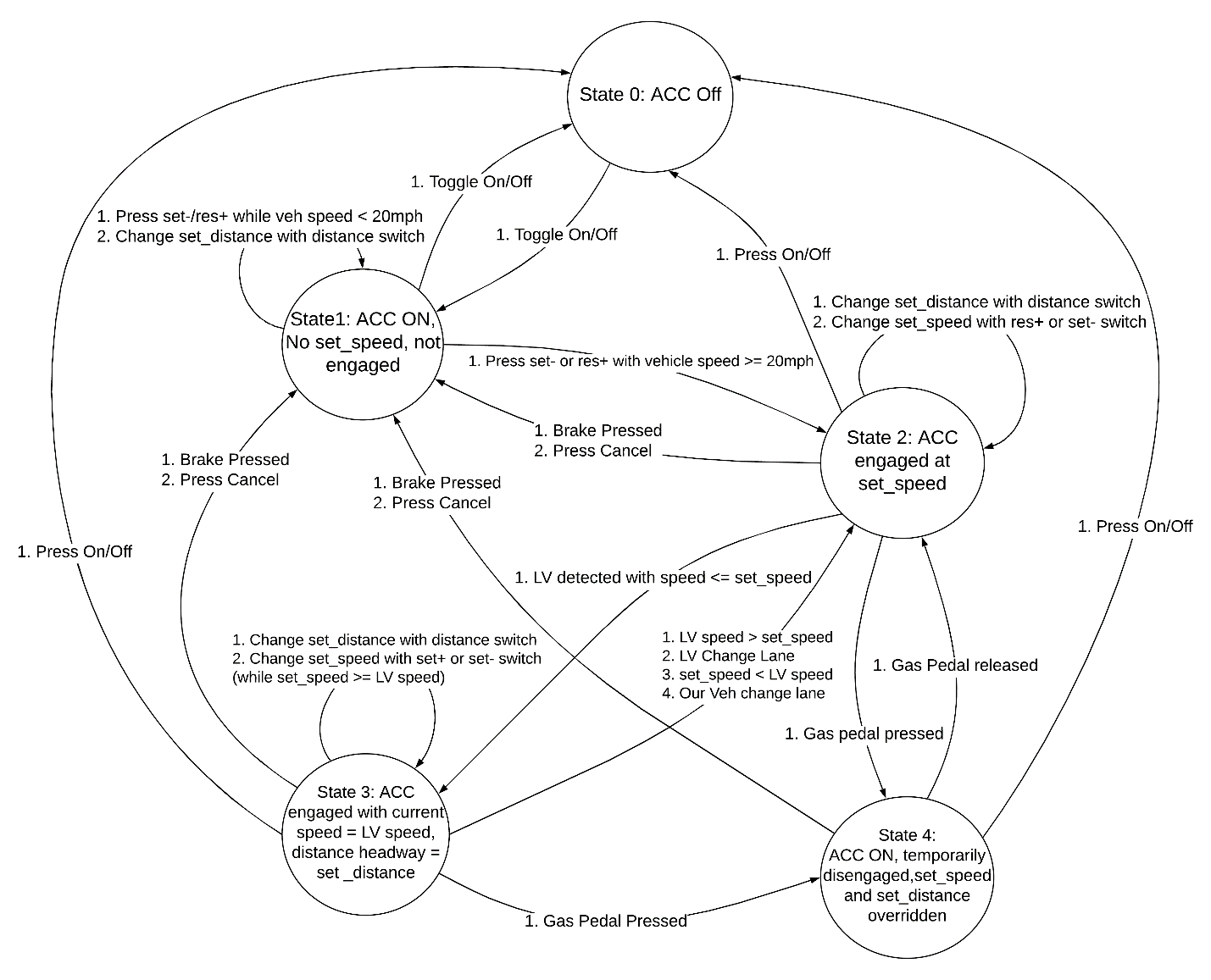
State Diagram for a Generic Adaptive Cruise Control System (LV = lead vehicle).
Manufacturer Reporting of System Limitations
Although ACC and other advanced vehicle systems may improve safety, they do have inherent limitations. These limitations are not intuitive and drivers may not understand these limitations accurately. Vehicle documentation (e.g., owner’s manuals) is an important source of information regarding system function and limitations. In order to better understand how these limitations are portrayed in the vehicle documentation, investigators identified all reported limitations of ACC across several different manufacturers. They examined how these limitations were described and whether the presentation of these system limitations was consistent and comparable across manufacturers. A total of 10 vehicle makes/models were included in this exercise. Information regarding ACC system limitations was extracted from the text of the vehicle user manuals. It was then tabulated and categorized according to scenarios and events when ACC would potentially fail or come close to failing (e.g., poor weather conditions).
Overall, across the ten vehicles included in this exercise, the manuals presented information concerning system limitations in a non-standardized manner with significant differences in reporting style, including variability in terminology, in emphasis on safety, and in descriptions of scenarios. Some manufacturers listed as many as 35 system limitations, while some listed fewer than half of that number. While these could reflect variation in the robustness of the different systems, it is likely the case that some systems indeed have important safety-related limitations that are not communicated clearly or mentioned at all in the manuals. The implications are elaborated in the full report.
Authors
Suggested Citation
Pradhan, A.K., Pai, G., Knodler, M., Fitzpatrick, C., & Horrey, W.J. (2021). Driver’s Mental Models of Advanced Vehicle Technologies: A Proposed Framework for Identifying and Predicting Operator Errors (Technical Report). Washington, D.C.: AAA Foundation for Traffic Safety.

